Сл№гНш№ю¶ы±х11ФВ18ИХПыПўЈЁјЗХЯВнїЎзвЈ©11ФВ17ИХ16К±50·ЦЈ¬ѕ№эФј5.5РЎК±µДіцІХ»о¶ЇЈ¬ЙсЦЫК®ЛДєЕєЅМмФ±іВ¶¬ЎўБхСуЎўІМРсХЬГЬЗРРН¬Ј¬ФІВъНкіЙіцІХ»о¶ЇИ«ІїјИ¶ЁИООсЈ¬єЅМмФ±іВ¶¬єНІМРсХЬТС°ІИ«·µ»ШїХјдХѕОКМмКµСйІХЈ¬іцІХ»о¶ЇИЎµГФІВъіЙ№¦ЎЈУЙ№ю¶ы±х№¤ТµґуС§»ъµзС§ФєБхєкФєКїЎўР»ЧЪОдЅМКЪНЕ¶УєНЦРїЖФєі¤№вЛщБЄєПСРЦЖµДРЎ»ъРµ±ЫНкіЙКЧґОЛ«±ЫЧйєПЦ§іЦєЅМмФ±іцІХИООсЎЈ
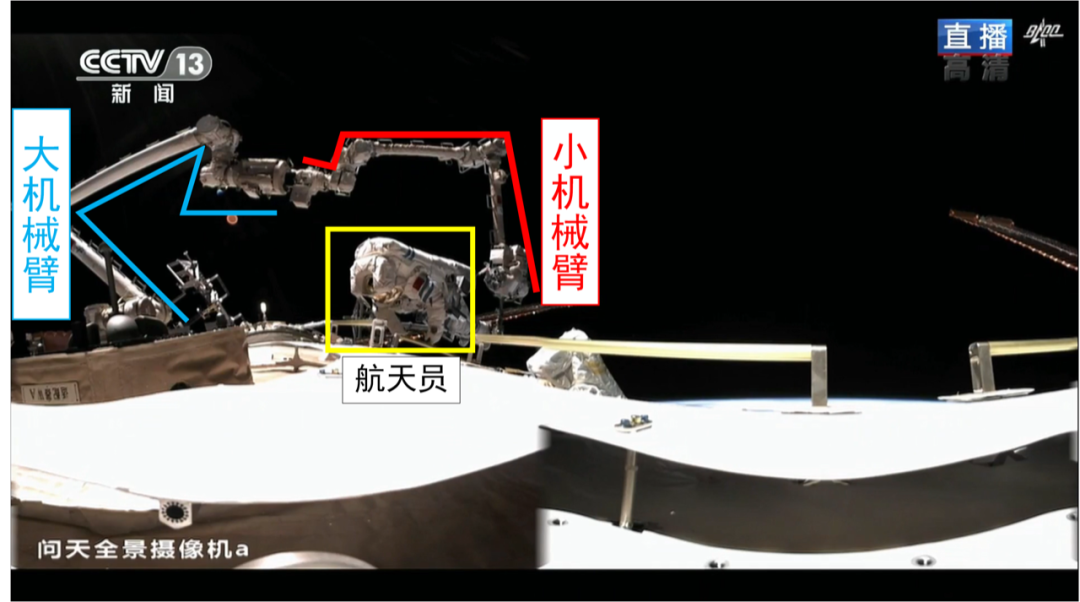
ЧйєП±ЫЧґМ¬ПВЈ¬єЅМмФ±ФЪРЎ»ъРµ±ЫД©¶ЛЙПЈЁСл№гНш·ў №ю№¤ґу№©НјЈ©
ЙсЦЫК®ЛДєЕєЅМмФ±іЛЧйЅсМмЅшРРµЪИэґОіцІХ»о¶ЇЈ¬ґЛґОіцІХКЗїХјдХѕЎ°TЎ±ЧЦРОИэІХ№№РНЅЁіЙєуµДКЧґОіцІХЎЈґЛґОИООсЦРЈ¬РЎ»ъРµ±ЫНЁ№э»ъРµ±ЫЧЄЅУјюУлґу»ъРµ±ЫЧйєПЖрАґЈ¬КµПЦЛ«±ЫјдµзЖшєНРЕПўµД»ҐБЄ»ҐНЁЎЈЎ°Л«±ЫєПТ»Ў±єуЈ¬Хыёц»ъРµ±ЫПµНі»о¶Ї·¶О§ёьґуЎўІЩЧчЧФУЙ¶Иёь¶аЈ¬КµПЦБЛєЅМмФ±ёьґу·¶О§µДїмЛЩЧЄТЖЈ¬ЅшТ»ІЅМбёЯєЅМмФ±µДІХН⹤ЧчР§ВКЎЈ
ґЛґОіцІХКЧґОјмСйБЛєЅМмФ±УлЧйєП»ъРµ±ЫРН¬№¤ЧчµДДЬБ¦Ј¬ЅшТ»ІЅСйЦ¤БЛОКМмКµСйІХЖшХўІХєНіцІХ»о¶ЇПа№ШЦ§іЦЙи±ёµД№¦ДЬРФДЬЎЈН¬К±Ј¬Л«±ЫФЪ№мЎ°ОХКЦЎ±ОЄєуРшЛ«±ЫЧйєПНкіЙёЯДС¶ИЎў¶аСщ»ЇИООсМṩУРБ¦Ц§іЕЈ¬ВъЧгБЛїзІХ¶ОЎўИ«їХјдХѕґу·¶О§І»Н¬О»ЦГѕ«ПёЧчТµµДРиЗуЈ¬УРБ¦±ЈХПОТ№ъїХјдХѕФЪ№мЅЁФмИООсЛіАыНкіЙЎЈ
Л«±ЫЧйєП№эіМЈЁСл№гНш·ў №ю№¤ґу№©НјЈ©
ОґАґЈ¬ЅиУЙЧйєП±Ы№¦ДЬЈ¬РЎ»ъРµ±ЫїЙУЙОКМмІХЧЄТЖЦБГОМмІХЙПЈ¬КµПЦРЎ»ъРµ±ЫµДїзІХ¶ОЧЄТЖЈ¬ОЄєуРшГОМмІХЙПРЎ»ъРµ±ЫµҐ±ЫІЩЧчИООсµм¶Ё»щґЎЎЈЛ«»ъРµ±ЫПµНіїЙЦ±ЅУґУМмЦЫ»хФЛ·Йґ¬µДїЄ·ЕКЅ»хІХЦ±ЅУЧҐИЎ»хОпЈ¬°бФЛЦБКµСйІХµДІХНⱩ¶ФШєЙ№ТµгЅшРР°ІЧ°Ј¬Ѕш¶шКµПЦЎ°їзІХ°б»хЎ±ЎЈМ칬їХјдХѕНкіЙФЪ№мЧйЧ°ИООсєуЈ¬МмєНєЛРДІХМ«СфТнОЄЅвѕц№вХХХЪµІОКМвЈ¬Ѕ«ФЪ№мЧЄТЖЦБКµСйІХимјЬґ¦°ІЧ°Ј¬ЅмК±ТІїЙДЬ»бУГЙПЛ«±Ыј¶БЄЧйєП№¦ДЬЎЈ
ЧЄФШЙкЗлКВТЛТФј°±Ёёж·З·ЁЗЦИЁРРОЄЈ¬ЗлБЄПµОТГЗЈє010-56807194
 і¤°ґ¶юО¬Вл
і¤°ґ¶юО¬Вл№ШЧўѕ«ІКДЪИЭ





